









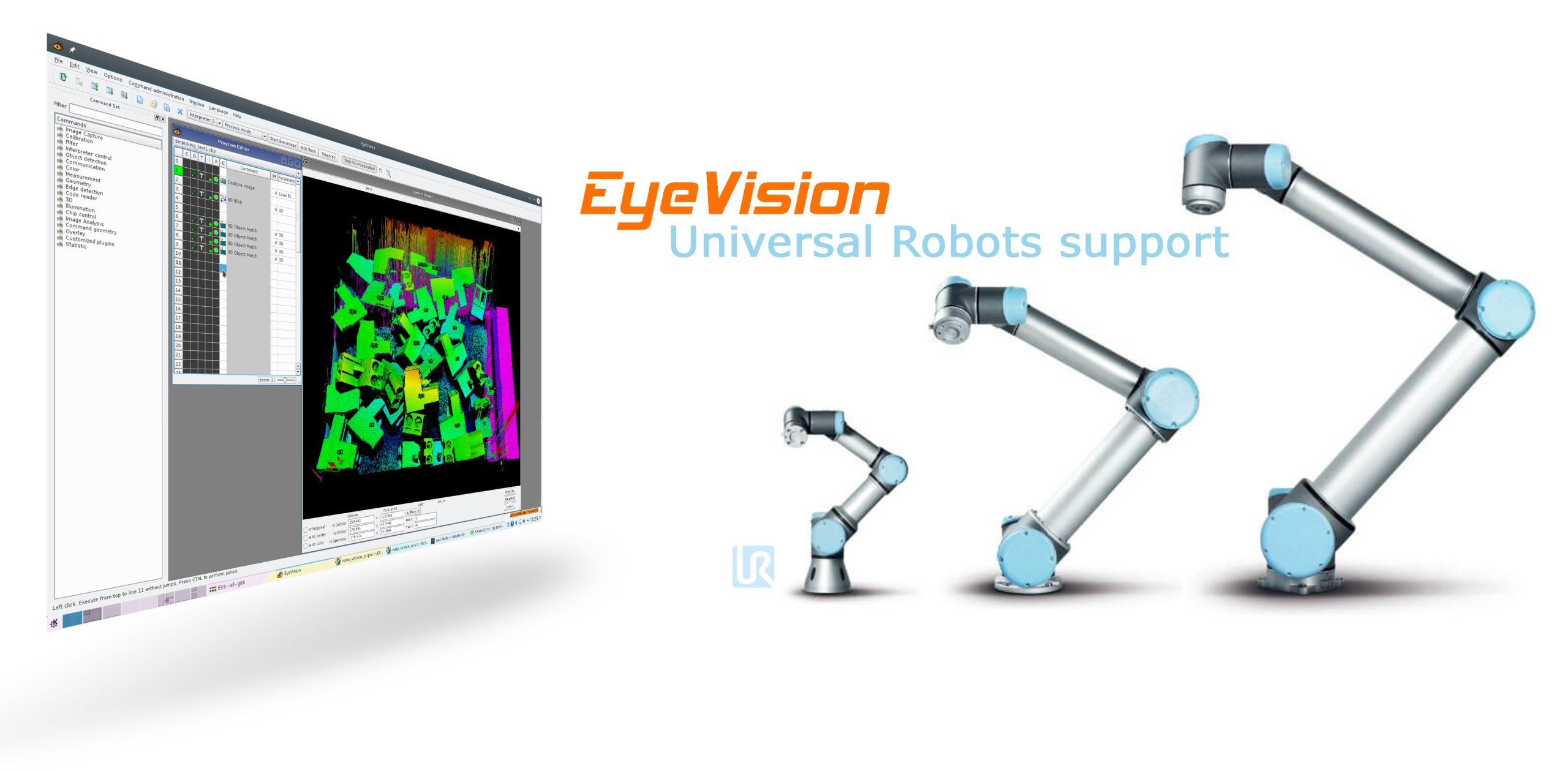
Mit dem neuen Befehl in der Eyevision wird die Steuerung und die Kommunikation mit einem UR Roboter vereinfacht. Aufwendige Programmierung wird durch nur einen Befehl erledigt – einfach die notwendigen Aufgaben an den UR Roboter schicken. Mit dem neuen Befehl werden RobotVision Lösungen für 2D, 3D und Thermobildauswertung und einem UR Roboter mit wenigen Mausklicks realisiert. Darunter Auswertungen im 3D Bereich wie für Bin-Picking.
Ein Bauteil wird mit der Orientierung eingelernt, die vom Greifer erfasst werden kann. Die Software erkennt alle Bauteile die so positioniert sind, dass sie vom Greifer gefasst werden können und überprüft auch gleich ob genügend Freiraum für den Greifer vorhanden ist. Die Positionsdaten der Bauteile werden dann mittels dem UR Befehl an den Roboter geschickt. Dieser kann dann die Bauteile anfahren, greifen und entnehmen.
Eine automatische Prüfung von Bauteilen an unterschiedlichen Stellen ist mit dem UR Befehl genau so möglich. Die Bildverarbeitung schickt dem Roboter die Position an der die Kamera als nächstes prüfen will. Der Roboter fährt den Sensor an die Position und dort wird ein Bild aufgenommen. Das Bild wird dann mit der EyeVision ausgewertet. Als Ergebnis kann die EyeVision dem Roboter den Auftrag geben das Bauteil zu entnehmen und entweder in die Gutablage zu legen oder an den Nacharbeitsplatz.
Welcher Sensor zum Einsatz kommt bestimmt der Anwender. Die EyeVision Software unterstützt eine Vielzahl von Sensoren, sowohl 2D (Farb- und Grausensoren) als auch eine große Anzahl von 3D Sensoren und Thermografie- sowie Multispektralsensor. Mit dem UR Befehl ist es möglich den Roboter schnell zu veranlassen einen neuen Sensor zu holen um eine andere Aufgabenstellung zu lösen. Die Auswertung der verschiedenen Sensorbilder geschieht in dem Zug genau so einfach wie der Roboter gesteuert wird.
IFFA 2025: Nachhaltigkeit in der Praxis
Die IFFA 2025 zeigt Technologien und Lösungen für mehr Nachhaltigkeit, denn die Recyclingquote bei Verpackungen muss erhöht werden. Die fleischverarbeitende...
Read more
